 Совсем недавно мы с друзьями собрали робота MICROBUG, о котором я писал в одной из своих прошлых статей. Сегодня публикую небольшую заметку о процессе сборки, выкладываю несколько фотографий и видео.
Совсем недавно мы с друзьями собрали робота MICROBUG, о котором я писал в одной из своих прошлых статей. Сегодня публикую небольшую заметку о процессе сборки, выкладываю несколько фотографий и видео.
Предыстория
В прошлом году мне подарили робота MICROBUG, а точнее набор элементов из которых его можно собрать. Такие наборы используются в Нидерландском университете Hanze Institute of Technology для обучения студентов.
Инструкция со схемой сборки идет в наборе. Для того, чтобы собрать MICROBUG необходимо около часа времени и следующие инструменты:
- Паяльная станция (паяльник).
- Кусачки.
- Отвертка.
- Ножницы.
- Формовка (можно обойтись и без нее).
Вкратце, что может MICROBUG?
Спереди у робота находятся два световых датчика (один слева, второй справа). Чем меньше света попадает на какой-то из датчиков, тем робот активнее начинает уходить от затемненного места. В общем, основная цель MICROBUG это двигаться на свет. При этом, чувствительность световых датчиков можно регулировать с помощью двух настроечных ручек.

Робот MICROBUG
Подготовка и процесс сборки
В один из весенних солнечных дней у меня появилось свободное время и я решил прогуляться к друзьям, работающим на предприятии, которое специализируется на разработке и производстве испытательного оборудования и средств измерений в области электромагнитной совместимости. Заодно захватил с собой робота, чтобы попросить друзей помочь его собрать.
При встрече со специалистами и друзьям в одном лице этого предприятия, после того как я озвучил свою просьбу, их ответ был примерно следующий: «Вот паяльная станция и необходимые для сборки инструменты, садись, делай, а мы будем смотреть и контролировать процесс сборки» :).
Такого поворота событий в хороший солнечный день я конечно же не ожидал :). В общем, большую часть устройства пришлось собирать и паять самому :) Процесс сборки проходил весело и эмоционально, каждую минуту мне давались ценные советы и рекомендации :) .
Далее, выкладываю фотографии, сделанные в процессе создания робота MICROBUG.

Все элементы из коробки
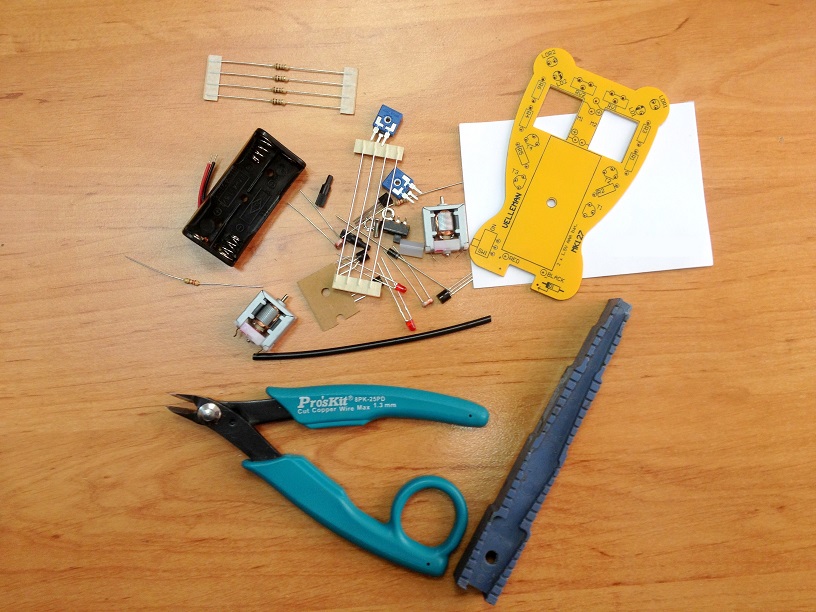
Достали все элементы из пакетиков, подготовили кусачки и формовку

Паяльная станция
Заключение
Как выяснилось, за счет изменения длины ножек робота можно регулировать его скорость перемещения. Для того, чтобы он двигался быстрее нужно установить более короткие ножки. Робот успешно прошел испытания. Был показан и не совсем адекватно воспринят домашним животным кошачей породы :).
В заключении хочу поблагодарить всех тех кто принимал участие в сборке и тестировании MICROBUG, а именно Михаила, Евгения и Илью!
Всем хорошего весеннего настроения!
[tube] http://www.youtube.com/watch?v=w6kpISW5zsk, 400, 240 [/tube]
Видео, сделанное нами
[tube] http://www.youtube.com/watch?v=GLVSj8RlVsU, 400, 240 [/tube]
Видео из Интернета
Приглашаю подписаться на новости моей публичной страницы ВКонтакте, ее адрес http://vk.com/itmultimedia . Буду рад видеть Вас в своих подписчиках!
Похожие статьи
 Учебный класс будущего
Учебный класс будущего Интернет в Европейских университетах. «Доступ будет приостановлен во время экзаменов»
Интернет в Европейских университетах. «Доступ будет приостановлен во время экзаменов» Совместный просмотр фильмов в Интернете
Совместный просмотр фильмов в Интернете Открытые позиции для PhD и постдоков в Клагенфурте (Австрия). Направление исследований: «Adaptive Streaming over HTTP and Emerging Networked Multimedia Services»
Открытые позиции для PhD и постдоков в Клагенфурте (Австрия). Направление исследований: «Adaptive Streaming over HTTP and Emerging Networked Multimedia Services» Автобусная остановка с сюрпризом. Канада
Автобусная остановка с сюрпризом. Канада


Комментарии: